Find Your Own Way: Weakly-Supervised Segmentation of Path Proposals for Urban Autonomy
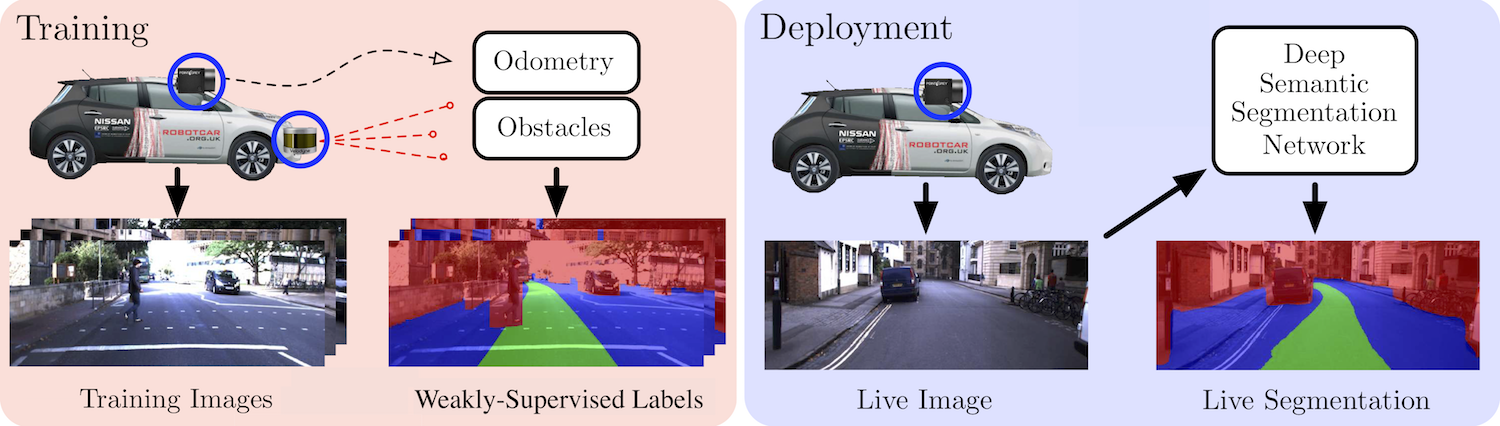
Abstract - We present a weakly-supervised approach to segmenting proposed drivable paths in images with the goal of autonomous driving in complex urban environments. Using recorded routes from a data collection vehicle, our proposed method generates vast quantities of labelled images containing proposed paths and obstacles without requiring manual annotation, which we then use to train a deep semantic segmentation network. With the trained network we can segment proposed paths and obstacles at run-time using a vehicle equipped with only a monocular camera without relying on explicit modelling of road or lane markings. We evaluate our method on the large- scale KITTI and Oxford RobotCar datasets and demonstrate reliable path proposal and obstacle segmentation in a wide variety of environments under a range of lighting, weather and traffic conditions. We illustrate how the method can generalise to multiple path proposals at intersections and outline plans to incorporate the system into a framework for autonomous urban driving.
Further Info - For more experimental details please use the following links, watch the project video below, or drop me an email:
[Paper] [Video] [Interactive Poster]
@inproceedings{
BarnesICRA2017,
Address = {Singapore},
Author = {Barnes, Dan and Maddern, Will and Posner, Ingmar},
Booktitle = {Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)},
Month = {June},
Pdf = {https://arxiv.org/pdf/1610.01238.pdf},
URL = {https://arxiv.org/abs/1610.01238},
Title = {Find Your Own Way: Weakly-Supervised Segmentation of Path Proposals for Urban Autonomy},
Year = {2017}
}